Underwater maintenance and inspections
15 November 2006Inspection and maintenance is critical to the performance and longevity of underwater infrastructures, writes Robert Clarke and Jason Gillham. To help make inspection easier, a dual axis sonar system has been developed to operate in high flow conditions and provide accurate dimensional information regarding structures and accumulated debris
Due to their inherently inaccessible nature, the inspection and monitoring of underwater structures has always provided challenges to owners of facilities with submerged components. Commercial divers and remotely operated vehicles (ROVs) have been used to great advantage for inspection of specific areas but for surveys that cover broad areas, it is difficult to assemble point measurements that these approaches generally provide into a consolidated presentation. Another significant disadvantage to using these types of inspection methods is that neither is appropriate for use where there are high flow conditions. For intake structures and pumping facilities, this often requires shutdown of the unit being inspected plus the adjacent units. Apart from lost revenues directly associated with the shutdown, there are often additional labour costs – regulatory and in-house administrative work required to bring units off line and then re-engaging them upon completion of the inspection. These inspections may be done on a routine basis during a planned outage, but where more frequent inspection is warranted or if there is no other reason for an outage, the ability to conduct inspection surveys under operational flows would present a great cost saving to the owner. The use of scanning sonar can provide this advantage plus much more.
Scanning sonar for underwater metrics
A sonar emits a pulse of sound and measures the time it takes between the transmission of this signal and the reflected echo from a target. Multiplying this by the relevant speed of sound, an accurate determination of the distance to the target can be calculated. Scanning sonar repeats this pulse-echo process several times as the transducer head is rotated through pre-set increments, effectively scanning a line. There are two basic modes for scanning sonar, imaging and profile.
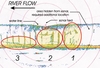
Scanning sonar can be used for imaging along the surfaces of bridge piers, intakes and walls to provide a qualitative assessment of debris accumulation and possible scour (Figure 1). This representation is two-dimensional, similar to a photograph and cannot be used to identify the actual location of the debris (or scour) in the third dimension (relief) or the quantity. In order to quantify the volume of debris or the extent of scour, measurements must incorporate survey points that are known in three dimensions so that volumetric calculations can be made.
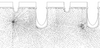
Scanning sonar that has been configured for profiling instead of imaging can be used to obtain these three-dimensional measurements (Figure 2). By setting up the sonar at several locations, a sufficient number of survey points can be collected to provide adequate coverage of the area. This takes considerable time to accurately install and locate the sonar at each survey line – generally longer than the time taken to actually complete the scan.
One of the main benefits of using the scanning sonar in this manner is that the position of the scanning head can be fixed at one or more known locations. If the sonar head moves due to vibration or an insecure mount, then its location is no longer accurately known and the measurements being made will be in error unless extensive post-processing to correct for such errors can be done. This process requires synchronized information supplied by attitude sensors for the measurement and accurate logging of pitch, roll and possibly yaw or heading. Implementing these sensors within the dual axis system provides significant improvements upon the basic profiling method; a much higher point density with more detail can be obtained and fewer set-ups are required.
Operational description
The dual axis sonar available from ASI group consists of scanning sonar integrated with a precision actuator. An attitude sensor has also been integrated and an optional conductivity, temperature and pressure sensor can also be incorporated. The primary axis is part of the standard sonar and the one that the transducer rotates about, as shown in Figure 2. The second axis, provided by the actuator, is used to rotate the body of the sonar and is perpendicular to the primary axis. With the addition of attitude sensors, calibration of the data can be made based on the actual mounting angle of the head as well as provide an understanding of the stability of the system in high flow environments. With feedback from these sensors, the scanning process can be halted if there is movement of the overall system (due to vibration) and re-started when the system stabilizes. For increased accuracy the speed of sound may be calculated based on the water depth, temperature and conductivity. Given the known head rotation on both axes, the location of the point (return echo) can be determined in Cartesian coordinates. Repeating this for multiple angles allows the point cloud representation to be generated.
Proven success
Intake Structure
To maximize the performance of any intake, it must remain free of debris. Dual axis sonar is ideal for monitoring debris in this application. With multiple setups, it is possible to generate a point cloud representation of an entire intake face and the surrounding bathymetry without requiring a shut down. An accurate measurement of the amount of debris can be determined and the data can be viewed as the scan is taking place, providing immediate results. When multiple scans are performed across the face of an intake, the point clouds may be merged by determining common points in adjacent scans and lacing the data sets together. Generating a point cloud representation of an intake structure at scheduled intervals can provide both the ability to predict when a shutdown may be required to facilitate debris removal as well as prevent an unnecessary shutdown.
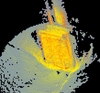
Since the sonar scans made with this system are made along two axes, details of submerged components that may be perpendicular to the structure are also recorded. The scan lines of the first survey of the intake structure shown in Figure 2 did not intersect the pier noses at any time. No details of these were recorded. With the subsequent dual axis survey shown in Figure 3, the survey scans were not only perpendicular to the face of the intake, but were made at roughly 3 degrees increments to cover 180 degrees and intersected the pier noses. Details of the stepped pier noses were clearly indicated, confirming as-built information that was previously in dispute. The three-dimensional nature of this data and the pier nose details are shown in Figure 4.
For intake structures, the results from imaging and dual axis sonar surveys can be combined into one graphical presentation that does not require the technical interpretation more common with the basic sonar scans (Figure 5). The saying 'A picture is worth a thousand words' is very appropriate for this type of presentation. While the images are certainly spectacular, it must be remembered that they are based on true three-dimensional data points from which accurate measurements can be made.
Surge Shaft
The first deployment of ASI's dual axis system was for the survey of a 183m vertical surge shaft, of which 152m was submerged. The requirement was to conduct an accurate survey in order to determine the verticality of the shaft and smallest clear vertical opening into which a steel liner could be installed. Conducting several horizontal scans with a profile sonar was first proposed but the client was concerned that even with a vertical spacing of 0.45m some details may be missed. Conducting a series of short vertical scans around the circumference may lead to missing details in the radial direction. In order to accommodate those concerns, the sonar was mounted on a 45 degrees angle instead of the normal horizontal attitude. This resulted in the shaft being surveyed in diagonal slices, each slice being elliptical in nature. After several scan patterns were completed, the optimum level of detail was obtained with a measurement pattern that resulted in a point being measured every 15cm radially and 30cm vertically.
Upon completion of one scan, the sonar head was rotated a fixed amount and another scan was completed. Once a full set of these scans was completed, covering roughly a 3.5m height, the sonar head was lowered 3m and another set of scans was initiated. This provided a 0.3m overlap between scan sets, resulting in a highly dense pattern of measurement points which significantly reduced the chance of missing a defect.
The survey of the shaft was completed in less than three days, well within the routine maintenance outage of ten days. The upper portion of the shaft and the surrounding surge tank was completed with a high resolution, close range laser scanner. Data from the laser survey was processed and merged with the sonar data to provide a comprehensive data set for the overall shaft. The survey was tied into four temporary benchmarks that were set into the floor of the surge tank. These can subsequently be related to geodetic survey points at the client's convenience for integration with the known benchmarks.
The results of the survey provided definitive metrics that were used to determine the largest clear vertical diameter of the shaft. Also of interest was the identification of an offset in the existing shaft concrete lining which coincidentally fell within the overlap region of two adjacent scan sets. The duplication of the offset in the two independent data sets verified it as a true feature since it was clearly indicated in both independent sets of measurements. Another construction feature that was unknown prior to the survey was that below a certain elevation, the shaft diameter increased by six inches (15cm).
In this case, the surge shaft was vertical; however, inclined penstocks and horizontal tunnels can also be surveyed in this manner. The alignment of the structure does not affect the viability of data collection or processing.
Forebay sediment monitoring
Intake structures are only the beginning of a water delivery system. Other components include headrace tunnels, intake channels, forebays, wet wells and discharge channels, tunnels, or pipelines. Using a dual axis system, the sediment may be monitored from a number of fixed points in most of these types of structures, providing an understanding of where and when cleaning is required. This type of information leads to better scheduling of maintenance programmes and better utilisation of resources since the need (or not) can be clearly demonstrated prior to taking a system off-line. Based on remote surveys using sonar systems, it is not uncommon for cleaning programmes to be deferred since it can be clearly demonstrated that the actual debris accumulation or sediment build-up may not significantly impact the operating performance of a plant.
The set-up of the sonar system has to take into account the layout of the structure to be inspected. Similar to a light beam, the sonar's acoustic pulse cannot 'see' around corners or through dividing walls, piers or columns. To effectively plan a survey, accurate drawings should be used for reference by the inspection team in order to determine the best locations for the sonar deployment in order to optimise the coverage of the survey. This should be demonstrated to the client before the inspection begins so that areas of importance are not missed. For enclosed structures that are under plant floors, if it is considered necessary, holes could be saw cut through floors for insertion of the sonar system. These holes could then double as manned access entry points for future maintenance works.
Determining sediment deposits and debris accumulation has been the primary objective for most of ASI's dual axis surveys; scour and erosion are other viable objectives that such a survey can target. These surveys would be most effective when a baseline survey is available with which to compare subsequent inspections.
New opportunities
New technologies are often developed with the intention of replacing existing methods. Inevitably they also enable the completion of tasks that were not previously feasible. A dual axis sonar system could be used for Real Time Monitoring of sediment accumulation in critical facilities that may be subject to rapid build-up or for construction projects where active changes to the seafloor or river bed are part of the project. Although the time to perform a complete scan is measured in minutes, this rate of data collection may be acceptable to monitor an underwater construction process such as a drilling or dredging operation. Using the dual axis system, it would be possible to observe any collapse or undercutting taking place and take corrective action.
Remote measurement of silt and debris accumulation or scour and erosion can be readily accomplished with the use of scanning sonar systems. The extension of the scanning sonar into a dual axis system makes the collection of data far superior to a series of standard profile scans. The dual axis system can collect more points in a denser pattern than a single axis system within a given time period. These inspections can generally be done without the need for costly shutdowns and the information gathered can be used to develop more economic maintenance programmes.
Author Info:
Robert Clarke, P. Eng and Jason Gillham, ASI Group Ltd, 250 Martindale Road, St Catharines, Ontario, Canada. www.asi-group.com